Introduction #
acebott-ESP32-Car-Shield-V1.0 is an expansion board for the ESP32-Max-V3.0 controller board, which is mainly used for the construction of smart cars. The expansion board adopts a standardized connection method, simplifies the hardware connection process, and the most important thing is to increase the function of motor drive, which improves the development efficiency and flexibility of the project, so that developers can focus more on the core functions and innovation of the project.
For more information about the ESP32 controller board, please click the following link:
QA007/QA008/QA009 ESP32 Max V1.0 Controller Board
Features #
- Three 3-pin digital pins
- Two 3-pin analog pins
- Two rows of pin interfaces for ESP32-Max-V3.0
- Five DC motor interfaces
- Three I2C pins
- Three servo interfaces
- One serial port
- One ultrasonic interface
- One three-way Trace sensor interface
- One power interface (Max input voltage 15V Max output current 3A)
- Operating temperature 0~70℃
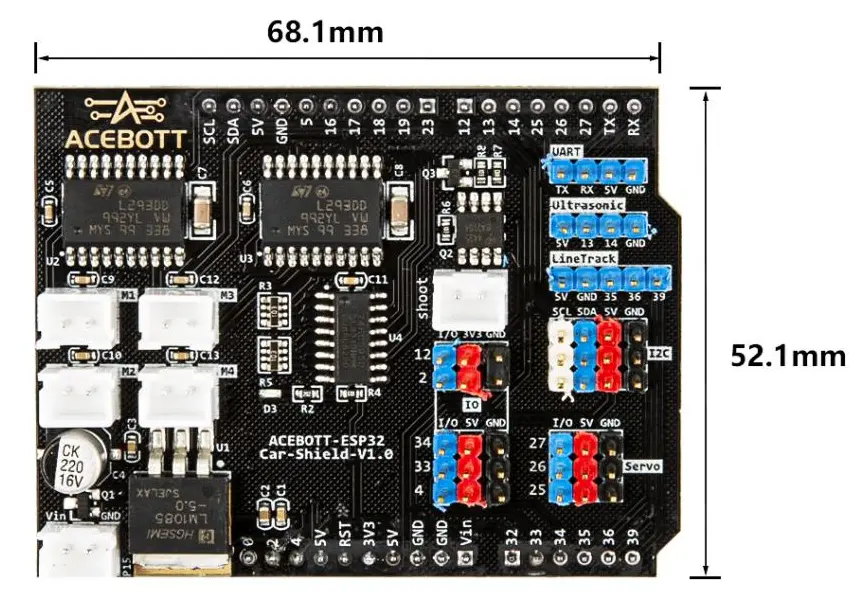
Specifications #
Size:68.1mm*52.1mm
Weight:22g
Case Example #
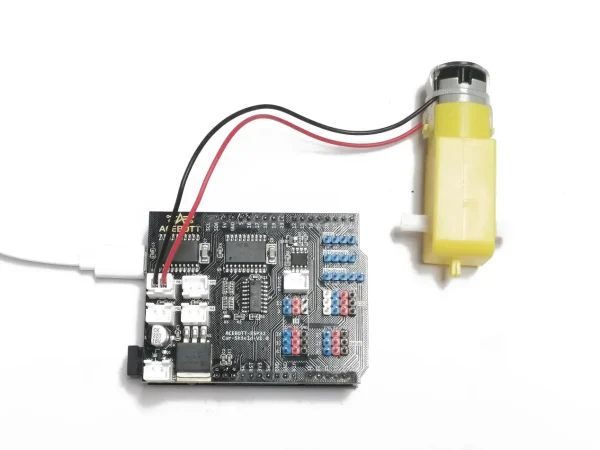
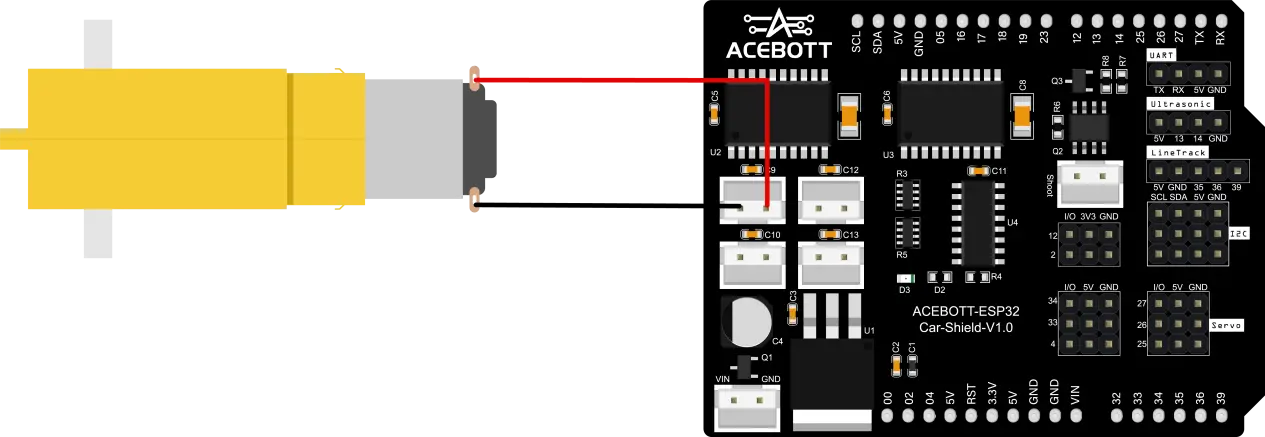
Connect the expansion board to the esp32 controller board, connect a TT motor in the M1 interface of the expansion board, upload the program, and control the forward and reverse rotation of the motor.
Wiring Diagram #
Sample Code #
#include"Arduino.h"
int M1_Forward = 128;//Corresponding to 10000000 in binary, M1 is moving forward
int M1_Backward = 64;//Corresponding to the binary 01000000, M1 moves backwards
void setup() {
pinMode(18, OUTPUT); // SHCP_PIN
pinMode(16, OUTPUT); // EN_PIN
pinMode(5, OUTPUT); // DATA_PIN
pinMode(17, OUTPUT); // STCP_PIN
pinMode(19, OUTPUT); // PWM1_PIN
}
//Define the motor pins and speed of the expansion board
void Move(int Dir, int Speed)
{
digitalWrite(16, LOW); // EN_PIN
analogWrite(19, Speed); // PWM1_PIN
digitalWrite(17, LOW); // STCP_PIN
shiftOut(5, 18, MSBFIRST, Dir); // DATA_PIN, SHCP_PIN, MSBFIRST, Dir
digitalWrite(17, HIGH); // STCP_PIN
}
void loop() {
Move(M1_Forward,255); //Motor forward rotation
delay(3000);
Move(M1_Backward,-255); //Motor reverse rotation
delay(3000);
}
Test Result #
After the program is uploaded, the TT motor cycles to achieve the effect of forward rotation for 3 seconds and then reverse rotation for 3 seconds.

Related Resources #
Get Quotation or Buy From #
B2B Business: info@acebott.com
Official Website: QA052 ESP32 Car Shield V1.0



